1
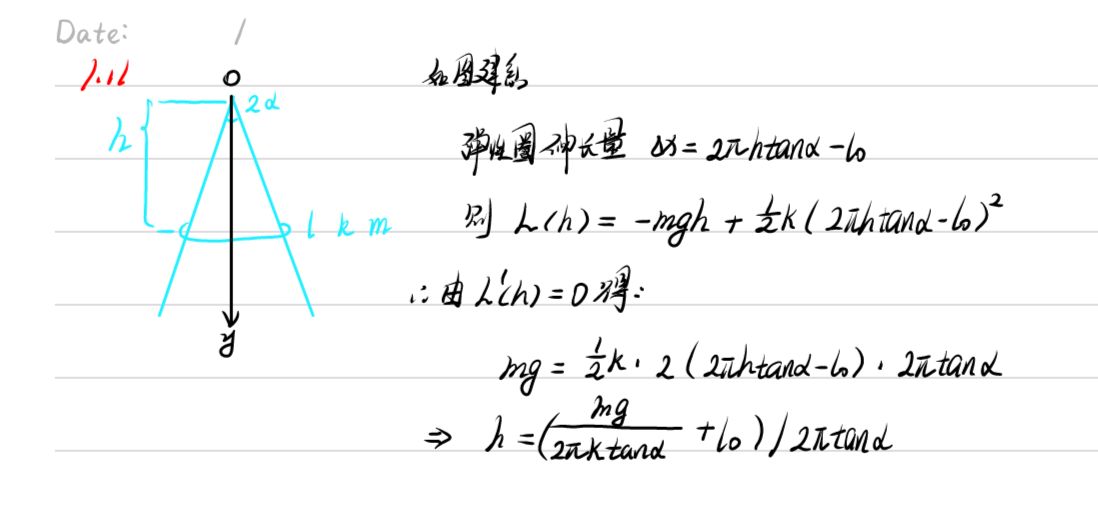
以圆锥顶点为原点,竖直向下为 z 轴正方向,所以弹性圈的半径为 ,弹性圈上的质点坐标是:
由 ,于是虚位移满足:
拉伸后弹性圈的长度变为 ,得到弹性圈上的一小段圆心角 的圆弧受到的弹力是:
得到其受到的主动力(重力+弹性力)是:
根据虚功原理:
两种方法都只适用于系统处于平衡的情况,在非平衡时,虚功原理进化为达朗贝尔原理,最小势能原理进化为拉格朗日方程。
2
以沿斜面向下为 x 正方向,圆柱转过的角度为 ,转动惯量为 ,约束条件 ,柱心的虚位移是 ,圆柱上某个质点的位置分解为质心位置+到质心的位移 :
根据达朗贝尔原理(主动力和惯性力的虚功和为 0):
其中最后一项:
得到:
根据约束 得到:
这是质心的运动方程,圆柱上质点只需要多加一个向心加速度。
3
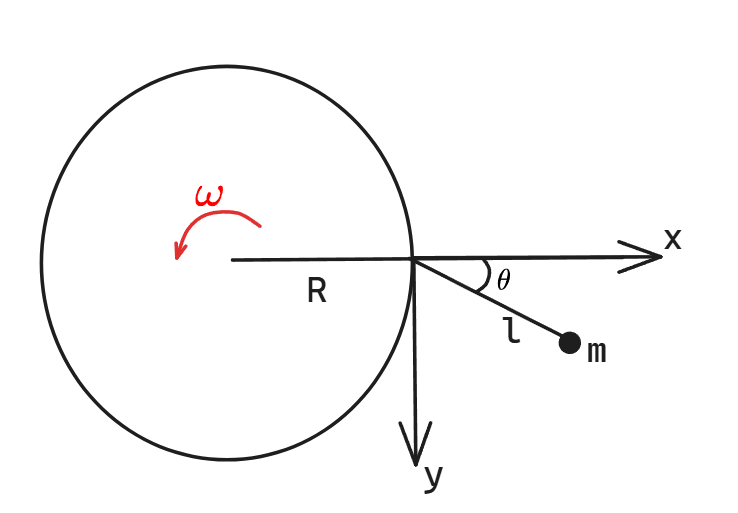
当系统处于稳定状态时,在圆盘的旋转参考系中,
于是:
化简得到:
等价于在 引力场中的运动。